


今年的微软室内定位大赛你准备参加吗?
文章来源来源:知乎 作者:杨涛 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
微软室内定位大赛是国际盛名的室内定位大赛(MS Indoor LOC Competition),从2014年开始举办,每年都能吸引大量的公司和高校团队参加。各个团队在同一块场地,利用各自不同的看家本领,来达到他们力所能及的最高定位精度。
注:室内定位是指在室内环境中实现位置定位,主要采用无线通讯、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现目标对象在室内空间中的位置监控。
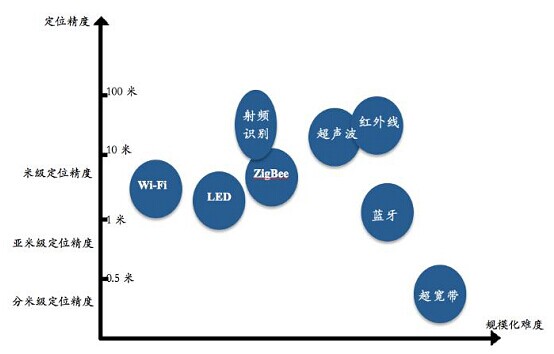
图片说明了室内定位技术精度分布和规模化难易度
2016年4月奥地利维也纳,定位大赛如期举行,我有幸参加了此次比赛。2天的赛程中,30多只参赛队的近100多人拥挤一个500平米大小的19世纪维也纳宫殿中,要在其中完成定位采集、上传、测试及最终的评测,对所有的参赛团队来说,都是一个有趣的挑战。经常地,你需要跨过别人的基站、绕开地上的电线,还要从人群中小心闪避那穿行于其中的近百万的激光雷达。
这次的比赛主办方将所有的参赛组分成了3D组和2D组,对于2组的定义,官方给出的标准是:3D组允许在场地中部署额外的辅助定位硬件,并且允许使用特质的设备作为被定位的终端,上报坐标时需要x、y、z三轴坐标;2D组不允许部署任何额外硬件,仅利用场地现有设施来进行定位,且必须使用智能手机、平板电脑或笔记本电脑作为被定位终端;在定位过程中,仅需x和y即可。
总的来说,3D组的技术基本上由激光、UWB、超声波构成;而2D组则基本上由惯性导航、Wi-Fi结合各种传感器为主。
对于3D组中的几乎所有定位技术,基本都是使用TOA/TDOA/AOA三种原理中之一(大家可以自行百度,这里不再赘述)来实现。
激光定位
整个环境里,最吸引人的明星,莫过于几台价值昂贵的激光定位装置。其基本上都由一个不停旋转的雷达以及处理终端构成。工程师把这些设备背在身后,激光雷达通常高于人头,并会不停的从360度发射激光。不停在建筑物内行走,就能完成整个场所的3维建模,同时可利用这些数据进行精确的室内定位。通常,这样的设备能达到极高的室内定位精度,误差基本在厘米级别,最优秀者甚至达到了0.05米的精度。

UWB
在3D组中,今年UWB技术占据了大半江山。UWB是Utral Wide-Band的缩写,是利用无线脉冲信号来定位。UWB技术需要部署额外的UWB基站,用来标定位置,定位时使用专有的UWB的信标,所以整个宫殿内随处可见高耸的UWB基站,与素雅的宫殿内景一起形成了独特又矛盾的风景。
从整个比赛的结果上看,UWB的定位误差精度基本上都在1米以内,国内也有优秀的UWB公司取得了不错的成绩。从使用模式来看,UWB更适合高精度的行业应用。

超声波定位
超声波定位的定位原理基本同激光及UWB,只不过信号的载体变成了超声波。一般而言,也能到达1米以内的精度。
iBeacon定位
原理类似WiFi指纹,只不过产生信号的源头由WiFi AP变成了iBeacon信标,Wi-Fi信号变成了蓝牙信号。iBeacon定位比起Wi-Fi定位的好处在于,其可以完美的支持iOS系统,并且可以在微信中使用,结合诸如位置营销、优惠劵分发等产生额外价值。其也是当前国内商用定位技术的主流,各大公司都在部署或试图部署自己的iBeacon网络。但就技术层面,原理大抵也和Wi-Fi指纹相似,这个后面会更加详细的描述。通常宣称iBeacon定位的精度在1-2米左右,因为iBeacon的载体是低功耗蓝牙,信号发射范围比较小,且信号较为稳定。但我们在市面上通常看到的iBeacon定位,并不能达到如此精度,这主要是由于目前市场上iBeacon设备的功控实现并不理想,不能保证信号处于一个较稳定的范围。
2D组不允许部署额外硬件设备,要求必须使用智能手机、平板电脑等个人终端作为定位装置。这样的组合更加贴近于实际场景,这也使得这样的定位技术更加具有挑战性,也更难以获得高精度。
主流技术包括:利用RSSI的定位技术(Wi-Fi定位)
利用现有场所的Wi-Fi 路由器来进行定位,如果没有iOS的强制限制,将会是绝佳的定位信号来源。现代的建筑大都部署了Wi-Fi,用来提供人们联网服务,虽然路由器严格来说也属于额外部署的硬件设施,但由于其上述的性质,使得Wi-Fi本身已经成为了建筑环境的一部分。但由于iOS系统未开放获取无线Wi-Fi信号强度的API,使得Wi-Fi定位技术的应用前景并不乐观。
Wi-Fi定位(iBeacon)的大概原理主要有2种技术方案,一种是需提前获知其AP的位置,然后通过无线信号衰减的物理理论公式,并加上三角定位算法或其他近距离算法,来计算出终端的位置;但由于无线信号在不同环境的衰减并不相同,使得这一方案获得的精度通常具有较高的误差;现在人们普遍使用的定位技术是指纹原理,大概思想是提前在室内的每个位置采集该点的坐标,以及当前能收到的Wi-Fi信号和强度,形成指纹数据库;在定位时,将终端实时到的信号及强度,与数据库中的指纹数据做匹配,相近者则为其大概位置。开发者只需对信号匹配公式进行数学建模,即可完成该算法的开发。各团队的差异基本来自于匹配算法的不同,以及与其他传感器的结合算法等。
主流纯Wi-Fi定位技术的精度一般在3~5米左右。
所有的基于无线信号强度的定位技术中,有2个因素非常关键,一个是信号源部署密度,另外一个就是无线信号的稳定程度。
惯性导航(PDR)
惯性导航是仅依据设备的惯性传感器(加速度、陀螺仪等)来进行的导航算法,理论上加速度计2次积分可获得距离、陀螺仪积分可获得角度,由距离及角度,即可知道在特定时间内的行走轨迹。但由于室内定位是人在持有设备,而人的行走姿态比较复杂,加上移动终端传感器的精度受限,加速度2次积分误差较大,所以依照上述方法,误差较大;另外一种替代方案是通过步态检测,检查一段时间中行走的步数,然后乘以人类的步长,即可获得行走距离;如果该设备绑定在鞋或脚上,这样由人手臂引起的误差即可消除,冠以较高精度传感器,可获得不错结果。但惯性导航的特点在于,短距离内能达到一个比较高的精度,在这过程中没有任何辅助的纠正措施,随着时间的推移,误差会累计增大;如果人行走姿态较为复杂,例如非匀速行走,频繁转身,无意识晃动导航设备等,都会增大误差;且惯性导航无法获知初始位置,所以一般往往用来做辅助导航手段,因此严格的来说,惯性导航并不属于定位技术,而是一种辅助。
此次竞赛,主办方允许手动输入初始位置,这也使得有的团队会使用惯性导航来进行参赛,但由于惯性导航无法获取初始位置,技术上并不是严格的闭环,无法用来单独使用,所以主办方在最终未将其纳入最终的成绩测算。
地磁定位
地磁定位是目前新起的导航技术,我们也是采用纯地磁定位参赛,最终以平均精度1.86米取得了2D组的第三。
地磁定位是利用建筑内独特的地磁场来作为信号源进行定位,相比起Wi-Fi、iBeacon等,地磁场天然存在,且较为稳定,如果建筑建构不发生大的改变,地磁分布也不会发生改变。建筑内的钢筋结构不同,为每个区域形成了其独特的磁场分布,地磁定位正是利用了这种分布来测算位置。地磁定位技术通常可以达到2米左右的精度。但地磁定位获取初始位置,需要持续行走5-8米左右,这给部分场景带来了一些限制。

通过本次比赛中各个队伍的各种表现,对于现有各种技术及使用场景,有了一个较为清晰的认识:
1、3D组总体来说,精度比2D组高较多,特别适用于某些对定位精度要求非常高的行业;但由于其需要部署额外的硬件或采用额外的终端,所以无法在大规模的个人市场中应用;
2、基于无线信号强度的定位,例如Wi-Fi、iBeacon可以通过单点采集大量数据,并对这些数据进行滤波(如kalman滤波)以获得较高精度(1-2米);但此种方式仅适用于单点定位,实时导航的效果就较差;
3、未来商业化的面向个人的定位技术,应该会是多种定位技术的智能融合方案,例如iBeacon+地磁或Wi-Fi+地磁+惯性导航等,这样能在获得较高精度的同时,也能获得较流畅的用户体验;
除了复杂原理和算法,比赛的另一个乐趣之一,就是你总能遇上各种有趣的人:
来自韩国的几位还在读研的学生,全程完全自费来参加此次比赛,对于学生来说,这笔费用并不便宜,但他们还是来了,为的就是来验证自己的想法;
3D组的一个团队,用了仅一个月的时间就完成了一个基本的室内定位系统;但在比赛过程中,却出现了10米以上的较大误差,他们本可以放弃成绩,不让这样的结果出现在基本都是厘米级别的3D组别里,但他们仍然坚持完成了比赛,面对失误毫无畏惧;另外一个黑人小伙,其同伴未能赶上及时的飞机,而他们所需的所有ZigBee的设备都在同伴身上。不知道他们经历了怎样的焦急和不安,当准备日(比赛前一天只有7个小时准备,之后所有的部署采集工作必须全部结束)结束的1个半小时之内,他们奇迹般的完成了从安装设备、调试、标定及测试的所有工作......
许许多多的团队在技术上的热情和执着,感染着在场的许多人;比赛不是目的,交流和探讨,共同提高才是此次比赛的意义所在;相信未来,通过交流和沟通,更好的室内定位技术将会给人们的生活带来更多的便利。
文中如有偏颇,欢迎大家一起探讨。
补充:2016微软全球室内定位技术大赛同济大学刘儿兀教授团队在室内定位技术大赛2D类摘得第一名桂冠。
刘教授表示,其团队开创性地研发出了一种名为DWELT的算法,对包括地磁、Wi-Fi指纹、Wi-Fi信号强度、惯导等多种数据源进行数据融合。
DWELT算法基于以下设计思路:在待定位点处,几种定位技术的效果同时很差,这样的几率很小。例如,在某些点实时预测到基于Wi-Fi信号进行定位的精度不高,这时基于地磁或者惯导进行定位可能较好;在某些点实时预测到基于地磁进行定位可能误差较大,这时有可能基于惯导或Wi-Fi信号进行定位较好。
刘教授直言,上述想法并不复杂,但实现起来难度却很大,特别是在数据融合算法以及惯导方面,DWELT算法有许多的设计。
DWELT算法能够基于环境情况动态调整不同数据源的定位信息权重,具有对多种定位技术的分集效果,从而达到较高的定位精度,正是克服了多种技术难题,不需要专门的硬件和额外的网络部署,即使环境中没有Wi-Fi信号也可以定位,定位精度约为1米。DWELT算法部署于网络服务器端时,不需要对手机等用户移动端做任何改动,只需要利用网络探测到的Wi-Fi信号强度即可定位,定位精度3米内。
基于不同的部署方式,DWELT算法能够实时跟踪行走轨迹,并能准确区分相邻房间和楼层,满足多数LBS室内定位业务1-3米精度的要求。DWELT算法正是采用了这样的最佳策略,利用简单易行的部署方案,博得了满堂彩。
刘教授坦言,DWELT技术目前相对其他室内定位技术尚有定位精度方面的优势,因此他们的团队下一步的目标则是更多地考虑算法的稳定性、易用性。

-
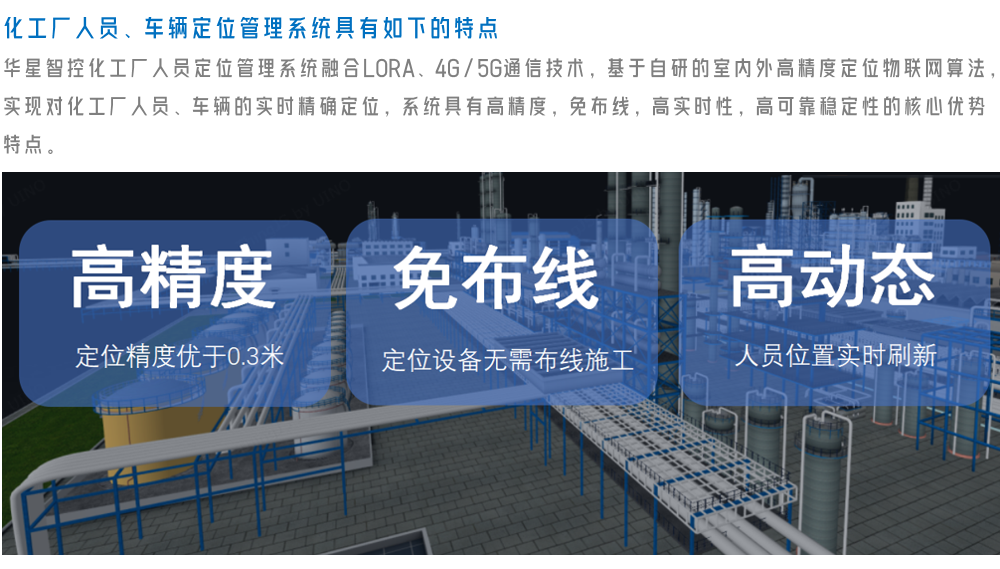
化工、石化、炼油厂人员及车辆定位方案
化工厂人员、车辆定位管理系统具有如下的特点:华星智控化工厂人员定位管理系统融合LORA、4G/5G通信技术,基于自研的室内外高精度定位物联网算法,实现对化工厂人员、车辆的实时精确定位,系统具有高精度,免布线,高实时性,高可靠稳定性的核心优势特点。
-

行车、天车防碰撞方案
通过在行车上安装精准测距基站,基站之间实时互相测距,设定一个危险距离R,当行车2和行车1或者行车3的距离小于R时,就会触发继电器工作启动声光报警器提醒司机或者切断电源让天车停止工作。
-

矿山人员车辆定位管理解决方案
矿山人员车辆定位方案是一种设计用于跟踪矿区内运载矿山人员的车辆位置的系统。 该系统通过提供车辆的实时位置信息,对于确保人员安全至关重要。 以下是矿山人员车辆定位方案的一些关键组成部分:GPS跟踪:该方案利用GPS(全球定位系统)跟踪矿山人员车辆的位置。 GPS 跟踪提供准确的位置数据,可用于监控车辆的速度和方向。车辆跟踪软件:从车辆收集的 GPS 数据被发送到中央系统,该系统使用车辆跟踪软件在地图上显示车辆的实时位置。通讯设备:该方案还需要无线电或手机等通讯设备,让车上人员能够与控制室和应急服务部门进行通讯。地理围栏:地理围栏是一项允许该方案在矿区内设置虚拟边界的功能。 如果车辆进入或离开地理围栏区域,该方案将向控制室发出警报。应急响应:该方案应制定应急响应协议,以防发生事故。 这可能涉及应急小组、疏散计划和急救设备。总体而言,矿山人员车辆定位方案是矿山安全的重要组成部分。 通过提供实时位置数据,该方案可以帮助预防事故并对紧急情况做出快速反应。
-
叉车防碰撞方案
车与人防碰撞:叉车上安装精准测距模块和声光报警器,预先设定好安全距离R,测距模块与人员携带的标签测距L,当距离小于预先设定的安全距离R时就触发测距模块的继电器接通声光报警器工作提醒驾驶员注意。
-

工业智能制造,电力电厂,钢铁治金定位方案
高精度人员、物资、车辆精准定位系统基于多维技术融合方案,可以实现10~30厘米的精准位置数据采集,可用于工业智能智能制,造汽车装配,电力电厂,钢铁治金等行业实现对工厂内的人、车、物、料等的精确定位、无缝追踪、智能调配与高效协同,大幅提升工厂的精益生产及精细化管理水平。
-
数据机房人员定位方案
通过在机房内布设有限数量微基站,实时精确地定位巡检人员上的微标签位置,零延时地将巡检人员位置信息显示在机房控制中心,进行安全区域管控、人员在岗监控等。精度达到10厘米级,精确管控以优化流程、合理调度安排、提高数据机房的巡检效率。
-
北斗储油罐、滑坡、采空区位移变形监测方案
北斗位移监测可实现水平±2.5毫米,垂直±5.0毫米的位置变化监测,可以用于滑坡,道路边坡,采空区,尾矿库,水库大坝,铁塔,储油罐等的形变监测,通过长期的连续监测,掌握被监测体的位置变化趋势,避免灾害事故发生。
-
隧道错车智慧调度方案
铁路隧道施工过程中,由于隧道宽度比较窄,只在固定的距离处有错车位置,当车辆交汇位置距离错车位置比较远的时候车辆需要倒车到错车位置才能错车,这就会导致花费很多时间来错车,大大的降低了工作效率。










